Wenyin Wei, Yunfeng Liang. Invariant manifold growth formula in cylindrical coordinates and its application for magnetically confined fusion[J]. Plasma Science and Technology, 2023, 25(9): 095105. DOI: 10.1088/2058-6272/accbf5
Citation:
Wenyin Wei, Yunfeng Liang. Invariant manifold growth formula in cylindrical coordinates and its application for magnetically confined fusion[J]. Plasma Science and Technology, 2023, 25(9): 095105. DOI: 10.1088/2058-6272/accbf5
Wenyin Wei, Yunfeng Liang. Invariant manifold growth formula in cylindrical coordinates and its application for magnetically confined fusion[J]. Plasma Science and Technology, 2023, 25(9): 095105. DOI: 10.1088/2058-6272/accbf5
Citation:
Wenyin Wei, Yunfeng Liang. Invariant manifold growth formula in cylindrical coordinates and its application for magnetically confined fusion[J]. Plasma Science and Technology, 2023, 25(9): 095105. DOI: 10.1088/2058-6272/accbf5
For three-dimensional vector fields, the governing formula of invariant manifolds grown from a hyperbolic cycle is given in cylindrical coordinates. The initial growth directions depend on the Jacobians of Poincaré map on that cycle, for which an evolution formula is deduced to reveal the relationship among Jacobians of different Poincaré sections. The evolution formula also applies to cycles in arbitrary finite n-dimensional autonomous continuous-time dynamical systems. Non-Möbiusian/Möbiusian saddle cycles and a dummy X-cycle are constructed analytically as demonstration. A real-world numeric example of analyzing a magnetic field timeslice on EAST is presented.
In the tokamak community, the magnetic topology is, most of the time, assumed to be nested flux surfaces, e.g. in Grad–Shafranov equation, EFIT, VMEC, etc. Based on this assumption, people have established a dedicated theory [1] of magnetic coordinates in which all magnetic field lines on a flux surface are straight. Nevertheless, the three-dimensional (3D) effect is ubiquitous in real-world fusion experiments since any facility in fusion machines, except the central solenoid and poloidal field coils, is 3D. For example, the toroidal field coils exhibit a ripple effect, the microwave and radio-frequency wave heating methods impose their distinctive localized distribution pattern of the induced current, and the neutral beam injection has an obvious non-axisymmetric current effect. Furthermore, most instability modes of plasma, such as the tearing mode and sawtooth mode, imply a significant 3D topology change of the magnetic field. The 3D effect is unavoidable in the magnetically confined fusion research, thereby requiring a deeper comprehension on the global field structure.
An enormous amount of fusion research has attempted to stimulate a chaotic field layer at the plasma boundary by either resonant magnetic perturbation (RMP) coils [2–4] or other means [5] to mitigate destructive type-I edge localized modes (ELMs). The theoretical basis was established in 1983 by Cary and Littlejohn [6] to estimate how wide the island chains are when an axisymmetric magnetic field is perturbed by a non-axisymmetric one, after which hundreds of researchers implement RMP coils to mitigate and suppress ELMs [7, 8]. The method is called magnetic spectrum analysis nowadays, heavily relying on Fourier transform of the radial component of the perturbation field, which is a linear operation in functional spaces. Therefore the utility of magnetic spectrum analysis is limited inside the plasma and becomes less and less accurate as the perturbation is strengthened, because Fourier transform is merely a linear operation and not capable of explaining the nonlinear behaviour.
With the aid of modern dynamical system theory, the structure of a 3D vector field can be comprehended and analyzed in terms of invariant manifolds [9, 10]. Various numerical methods have been developed to grow them [11–16]. Kuznetsov and Meijer systematically investigated the bifurcation behaviour of 1D and 2D maps when their parameters change [17, 18], presenting diverse analytic and numerical methods to study maps. However, the methods taken by mathematicians are too general to capture the essence of a 3D vector field, leaving the analysis as complicated as before.
Since the magnetic field dominates the plasma transport in magnetically confined fusion machines, the evidence of transversely intersecting invariant manifolds shall be easy to observe, which is a signature of chaos. The invariant manifolds are essential to determine the chaotic field regions, which induce a mixing effect inside the plasma. The plasma edge is not suitable to be characterized by a single closed surface when the 3D effect is strong, for which it is proposed to use the notion of invariant manifolds of outmost saddle cycle(s). In fact, it has been observed in some existing simulation [19–22] and experiment results. On EAST, the helical current filaments induced by the lower hybrid wave heating impacted the plasma edge topology and caused an evident splitting of strike points in experiments [5].
If RMP coils are imposed to suppress ELMs in tokamaks, the heat flux pattern at the divertor exhibits a complex toroidally asymmetric distribution, which poses challenges to ITER and DEMO divertor designs [23]. Simulation results demonstrate that the divertor plasma regions with connection to the bulk plasma are dragged further outside when the asymmetry is intensified [24, 25]. The field line connection length and the magnetic footprint (how deep the field lines penetrate into the bulk plasma) distribution at the divertor are usually ribbon-like. The RMP does mitigate or even suppress the ELMs, otherwise which can cause intolerable transient particle and heat flux. On the other hand, significant heat fluxes may arise far from the strike point originally designed for axisymmetric cases [26], possibly damaging the fragile parts of the divertor. Moreover, it remains unknown whether the total heat flux leaked from the bulk plasma is reinforced by the perturbation.
Previous research has attempted to draw the two transversely intersecting manifolds of hyperbolic cycles for 3D toroidal vector fields. Ottino from the community of fluid mechanics [27], Roeder, Rapoport, and Evans from the fusion community [28, 29] have drawn up the relevant figures. Abdullaev has deduced an approximate (to first order in ϵ because Poincaré integral is used) analytic implicit expression of the invariant manifolds of the outmost X-cycle when a single-null configuration is perturbed [30]. This paper carries forward the research and directly deduce the intrinsic analytic formula of the invariant manifolds of hyperbolic cycles without need for approximation.
Section 2 explains the definitions and denotations used in this paper. The theory skeleton of this paper is put in section 3, while the detailed proofs are put in appendix A. Section 4 offers intuitive examples to help understand the theory. Non-Möbiusian/Möbiusian saddle cycles and a dummy X-cycle model are constructed analytically. A real-world numeric example of analyzing a magnetic field timeslice on EAST is presented subsequently. Section 5.1 and appendix B give comparisons with others' works. Section 5.2 is the conclusion.
2.
Definitions and notations
Vector fields are presumed to be at least once continuously differentiable, i.e. of class C1. Although a vector field is denoted by B, it is worth emphasizing that it does not need to be divergence-free in this paper.
The flow X(x0, t) induced by the field B and the corresponding flow Xpol(x0, ϕs, ϕe) in cylindrical coordinates play a great role in the deduction of theory, especially the latter one (a flow is often denoted by ϕt or ϕ(t, x0) in other literature, but ϕ has been used as the azimuthal angle in this paper). Denotations used are listed in table 1. The symbol D serves as a differentiation operator w.r.t. the initial condition x0, as distinguished from those w.r.t. time-like variables t, ϕs or ϕe.
Table
1.
Denotations.
Cartesian
Cylindrical
FLT ODE system
˙x=B(x)→{x=Rcosϕy=Rsinϕz=Z
{dxR/dxϕ=RBR/BϕdxZ/dxϕ=RBZ/Bϕ(1)
Init. condition
x0=(x0x,x0y,x0z)
x0=(x0R,x0Z)
Flow
X(x0, t)
Xpol(x0, ϕs, ϕe), subscripts s for start, e for end
Naturally, the Poincaré map P(x0,ϕ) with x0=(x0R,x0Z) is defined by the standard R-Z semi-infinite planes Σ(ϕ) at ϕ angles, recording the strike points crossing the planes in one direction. If a trajectory flies around Σ(ϕ) through the opposite semi-infinite plane Σ(ϕ + π), then by definition the Poincaré map does not record the strike point on Σ(ϕ + π). Since the flow Xpol(x0, ϕs, ϕe) and the map P(x0,ϕ) are used frequently in this paper, different terminologies are used to distinguish the continuous-time dynamics from the discrete-time one, e.g. equilibrium point, trajectory and cycle are for continuous-time dynamics, while fixed point, orbit and periodic orbit are for discrete-time one.
This paper follows the definitions of stable and unstable manifolds given by Jacob Palis and Welington de Melo [31], (p. 73) for a hyperbolic fixed point (p. 59) and (p. 98) for a hyperbolic cycle (p. 95). In both cases the manifolds are defined by ω- and α-limit sets, so one can unify the manifold definitions in the continuous and discrete dynamics by considering manifolds of a hyperbolic set S (a definition at (p. 160) for the case of a map), since both hyperbolic fixed points and hyperbolic cycles are hyperbolic sets. Note a hyperbolic periodic orbit is also a hyperbolic set, which can be handled by the unified definition. Let (M, f) be a dynamical system, where f is a map P or a vector field B defined on a metric space or differentiable manifold M. The stable and unstable manifolds of a hyperbolic invariant set S for f are defined by ω- and α-limit sets, respectively
Ws(f,S):={p∈M:ω(f,p)=S},
(4)
Wu(f,S):={p∈M:α(f,p)=S},
(5)
where the superscripts u and s are short for unstable and stable, respectively. The term hyperbolic ensures the nearby trajectories/orbits on stable (respectively unstable) manifolds approach (respectively get away from) S at an exponential rate, without which the sets defined above are only qualified to be named stable (respectively unstable) sets [32] (p. 257), because the stable manifold theorem [31] (p. 75) requires S to be hyperbolic. Colloquially, the stable (respectively unstable) manifold is the set of points that will flow into (respectively flowed out of) S at an exponential rate [32] (p. 258). Kuznetsov and Meijer simply write f±k(x) → S as k → ∞ [18] (p. 4), where f is a map, without explaining what they mean by 'converging to a set S', which is suspected to be an alternative denotation of ω- and α-limit sets.
For notational convenience, arguments can be omitted if suitable, e.g. DX(t) and DXpol(ϕs,ϕe) are short for DX(x0,ϕt) and DXpol(x0,ϕs,ϕe) by omitting x0, DPm(ϕ) for DPm(x0,ϕ), and Wu/s(S) for Wu/s(f,S).
3.
From field line tracing to invariant manifolds
DX and DXpol imply the change of differential volume and area during FLT, respectively. Suppose a 2D map is written as (x, y) ↦ (u, v). The differential area expands, shrinks, or keeps constant after being mapped, as revealed by the following exterior product of differential 1-forms
As Xpol(ϕs, ϕe) is a typical 2D map from the section Σ(ϕs) to Σ(ϕe), the determinant of DXpol(ϕs,ϕe), denoted by |DXpol(ϕs,ϕe)|, is indeed the same thing as ∂xu ∂yv − ∂yu ∂xv. One could be curious about the geometric meaning of |DXpol(ϕs,ϕe)| and conjecture that it must be related to the divergence of the field, since it has been well-known [33] (p. 408) that for |DX(x0,t)|
which indicates that, for a divergence-free field, |DX(x0,t)| is always zero. A similar formula for |DXpol(ϕs,ϕe)| is deduced (proof in appendix A.1) to reveal the relationship between |DXpol(ϕs,ϕe)| and the divergence along the corresponding trajectory Xpol(ϕs, ϕ), ϕs ≤ ϕ ≤ ϕe, as shown below
|DXpol(ϕs,ϕe)|=exp(∫ϕeϕsR(∇⋅B)Bϕdϕ)Bϕ|ϕsBϕ|ϕe,
(8)
which applies to 3D vector fields of class C1, no matter whether they are divergence-free or not.
More importantly, DP±m(x0,ϕ) with x0 on an X-cycle γ of m toroidal turn(s) decides the two X-leg directions of the X-point. DPm(x0,ϕ)=DXpol(x0,ϕ,ϕ+2mπ) if Bϕ is positive everywhere. It is the two eigenvectors of DPm(x0,ϕ) that dictate towards which direction the two invariant manifolds of that hyperbolic cycle grow at the beginning. However, DPm(x0,ϕ) itself is more difficult to solve for than its determinant, which is a constant independent of ϕ for the cycle. This is because the right-hand side of equation (8) becomes a constant as ϕe = ϕs + 2mπ, i.e.
Unlike the determinant |DP±m(x0,ϕ)|, the matrix DP±m(x0,ϕ) varies w.r.t the azimuthal angle ϕ. The evolution rule of DP±m(x0,ϕ) w.r.t. ϕ is revealed in section 3.1.
To calculate DXpol(ϕs,ϕe) by integrating equation (3) requires that Bϕ on the trajectory does not change its sign. Otherwise, RBpol/Bϕ would be undefined due to zero Bϕ. These trajectories are not useless and could be well-defined in Cartesian coordinates. Suppose a trajectory goes from ϕs to ϕe, during which Bϕ may change its sign for several times. The zero Bϕ singularities cause inconvenience to solving for the DXpol(ϕs,ϕe). To get around the zero Bϕ singularity issue, one can solve for the corresponding DX first and then change its coordinates back to the cylindrical system. The following DX to DXpol formula (proof in appendix A.2) tells how to do so
where the subscripts start and end mean that the corresponding matrices are evaluated at the starting and ending point of this trajectory, respectively, i.e. (Xpol(ϕs,ϕs),ϕs) and (Xpol(ϕs,ϕe),ϕe).
3.1
The evolution of DP±m along a cycle
For a cycle of m toroidal turn(s), the relationship among the DP±m(ϕ) matrices at neighboring sections is desired, without which the calculation of their eigenvectors would spend unnecessarily enormous computational resources. The most primitive approach is definitely repeating the integration of equation (3) from ϕs to ϕs + 2mπ once and once again for various ϕs, i.e. from ϕ1 to ϕ1 + 2mπ, from ϕ2 to ϕ2 + 2mπ... To avoid this horribly primitive approach, the following DP±m evolution formula is deduced (proof in appendix A.3) to reveal how DP±m(ϕ) varies along the cycle
ddϕDP±m(ϕ)=[A(ϕ),DP±m(ϕ)],
(11)
where the square bracket denotes the commutator, i.e. [A,B]=AB−BA. In the dummy X-cycle demonstration figures 2(a) and (b), section 4.2, arrows are drawn to indicate the directions of eigenvectors.
The DP±m evolution formula can be applied to cycles in autonomous n-dimensional flows (n ≥ 2 and finite). For other dimensions than n = 3, the denotation |DX(x0,T)| is preferred than |DPm(ϕ)|, where T is the period of the cycle, because the former one does not rely on the choice of Poincaré section. The n-dimensional version of equation (11) in Cartesian coordinates is shown below
ddtDX(X(x0,t),T)=[∇B(X(x0,t)),DX(X(x0,t),T)].
(12)
Furthermore, it is desirable to deduce how an eigenvector of DP±m(ϕ) evolves along an X-cycle, so that one can get rid of the arbitrariness of the computed eigenvector direction, which depends on the specific eigen-decomposition numeric algorithm. If the eigenvector rotates a lot during evolution, the employed numerical method might give a reversed direction without consistency, i.e. the computed eigenvector may jump to the opposite side suddenly. The following DP±m eigenvector evolution formula (proof in appendix A.4) extracts the underlying rule governing the rotation of DPm(ϕ) eigenvectors along the cycle. Let the eigenvectors of DP±m(ϕ) be denoted by vi=[cosθi(ϕ),sinθi(ϕ)]T,i∈{1,2}. The derivative of Θ(ϕ) : = diag(θ1, θ2) w.r.t. ϕ satisfies
Θ′=([1−1]VΛ−DP±m[−1]V)−1(DP±m)′V,
(13)
where V : = [v1, v2] and Λ : = diag(λ1, λ2). We discovered in numeric implementation that the formula above (13), though accurate, but encounters some numeric issue while handling the X-cycles in island chains, because the two eigenvectors are so close to each other that some matrices in this formula might become pretty singular, i.e. have big conditional number. A much more robust way is to directly use DPm(ϕ) evolution formula (11) to evolve DPm(ϕ) and later comb the directions of eigenvectors.
Traditionally, fixed points of 2D maps are classified into hyperbolic, elliptic, and parabolic types based on their Jacobian eigenvalues. For the cycles of 3D flows, the authors want to imitate this naming convention. It is worth emphasizing that the eigenvalues of DP±m(ϕ) keep constant during evolution.4 Hence, it is safe to classify a cycle γ of m toroidal turn (s) by its DPm eigenvalues. The λ-invariance ensures the safety of such classification, because one does not need to worry about that the DPm(ϕ) eigenvalues at different ϕ are different.
4 This is a well-known fact in the ODE community, because it is easy to verify that DP(ϕ2) and DP(ϕ1) are similar by checking DP(ϕ2)=DXpol(ϕ2,ϕ1)−1DP(ϕ1)DXpol(ϕ2,ϕ1). The commutator form of the right-hand side of the evolution formulas (11) and (12) also ensures the λ-invariance. Let xi be a right eigenvector of DP±m and yTi the corresponding left eigenvector
DP±mxi=λixi,yTiDP±m=λiyTi.
(14)
Given a univariate matrix function A(ϕ), the derivative of its eigenvalue w.r.t. the single parameter ϕ satisfies λ′i=yTiA′xi [34]. Now substitute A by DP±m as shown below. It immediately lets us know both λi(ϕ) of DP±m(ϕ) do not change with ϕ
If both eigenvalues of DPm are not on the unit circle S of C, the cycle is said to be hyperbolic.5 If only one eigenvalue on the unit circle, the cycle is called partially hyperbolic (but not fully hyperbolic). If both eigenvalues are on S but neither equal 1 nor −1, the cycle is defined to be elliptic. If the two eigenvalues are identical to 1 or −1, the cycle is defined to be parabolic.
5 This definition is equivalent to the conventional one in [31] (p. 95), whose Poincaré section is chosen to be transversal to the local vector field.
Furthermore, a saddle cycle is defined to be one with |λ1| < 1, |λ2| > 1. Those saddle cycles with both eigenvalues negative (respectively positive) are called Möbiusian (respectively non-Möbiusian). Note that the Möbiusian cycle defined here is different from the classical Möbiusian strip. The cycles with both λ inside (respectively outside) the unit circle S of C are defined to be sinking (respectively sourcing) cycles
cycles of 3D flows {hyperbolic{ saddle { non − Möbiusian if both λ positive Möbiusian if both λ negative sinking if both λ inside S sourcing if both λ outside Spartially hyperbolic(but not hyperbolic) if one eigenvalue λ=1 or −1, while the other λ∈R∖{1,−1}non - hyperbolic{ elliptic if both λ on S but ≠±1 parabolic if both λ=1 or −1.
Magnetic fields are typical divergence-free fields, in which the so-called X-cycles, O-cycles, and the cycles on rational flux surfaces can now be formally defined as hyperbolic (meanwhile saddle), elliptic, and parabolic, respectively.
3.2
Invariant manifold growth formula in cylindrical coordinates
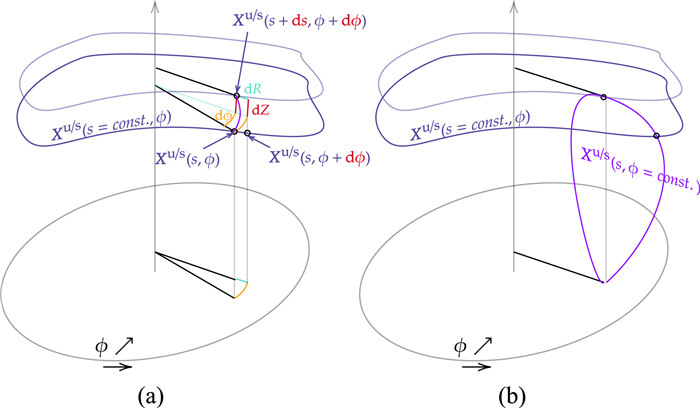
Let γ be a hyperbolic cycle with real eigenvalues of DPm. Since the invariant manifold of γ may grow endlessly, one of the two parameters of the manifold is naturally chosen to be the arc length s of the curves intersected by the 2D manifold Wu/s(B,γ) and R-Z cross-sections. For the other coordinate, the azimuthal angle ϕ is chosen. Define that s = 0 on the cycle and s increases towards the positive infinity as the manifold grows away from the cycle. The diagram (figure A1) in appendix A.5 could be helpful for readers to understand the geometry, which illustrates the relationship among the differentials used. The diagram is put in appendix because those readers who follow the proof there would need it more.
To be accurate, this paper defines a stable/unstable (manifold) branch to be a connected component of the manifold minus its invariant set, i.e. a connected component of Wu/s(f,S)∖S. For example, a saddle fixed point of a 2D map has 2 eigenvectors and 4 invariant branches.
An invariant branch of γ is parameterized to be Xu/s(s, ϕ) = (Xu/sR(s,ϕ),Xu/sZ(s,ϕ)). To deduce the governing equation of Xu/s(s, ϕ), one simply needs to analyse the differential relationship appearing in FLT, which is concluded in the following invariant manifold growth formula (proof in appendix A.5, requiring no more than knowledge of multivariable calculus)
∂Xu/s∂s(s,ϕ)=RBpolBϕ(Xu/s,ϕ)−∂Xu/s∂ϕ(s,ϕ)±‖
(16)
with the initial condition \left.\partial_s \boldsymbol{X}^{\mathrm{u} / \mathrm{s}}(s, \phi)\right|_{s=0} set to be the normalized eigenvector of {\cal D}{{\cal P}^m}(\phi ). Naturally, ∂sXu/s(s, ϕ) is 2mπ-periodic in ϕ for a non-Möbiusian saddle cycle. The denominator is essentially ds/dϕ, so the sign ± shall take + if the field line moves away from the cycle as ϕ increases. Otherwise, it takes −.
For Möbiusian saddle cycles, the invariant manifolds can be grown similarly with some subtle difference. A non-Möbiusian saddle cycle has two invariant branches for each stable and unstable manifold. But for a Möbiusian saddle cycle, the 'two' branches of a (un)stable manifold are considered as a whole (since they are connected, they are indeed one branch by definition). To parameterize such a branch, double the period of Xu/s(s, ϕ) in ϕ from 2mπ to 4mπ. Xu/s(s, ϕ) is opposite Xu/s(s, ϕ + 2mπ) across the cycle γ. Then the growth formula works again.
The growth formula would not grow a rational6 flux surface from aparabolic cycle on that surface, since any field line does not cover that surface. To grow this surface, the {\cal D}{{\cal P}^{ \pm m}} evolution formula is sufficient. One simply needs to move the cycle in the directions of the {\cal D}{{\cal P}^m} eigenvectors step by step. The role of {\cal D}{{\cal P}^{ \pm m}} evolution formula is to accelerate the computation of {\cal D}{{\cal P}^m}(\phi ) at all sections. For an irrational flux surface, one can choose a non-invariant 'cycle' which does not obey the FLT ODE system (1) and then employ the growth formula. For example, in an axisymmetric field, pick a 'cycle' whose R, Z coordinates are constants. The growth formula then degenerates into
6 In KAM theory, if there exists a diffeomorphism \varphi :{{\cal T}^d} \to {^d} ({^d} is the standard d-torus) such that the resulting motion on \mathbb{T}^d is uniform linear but not static, i.e. \mathrm{d} \boldsymbol{\varphi}(\boldsymbol{x}) / \mathrm{d} t=\boldsymbol{\omega} \in \mathbb{R}^d \backslash\{\mathit{\pmb{0}}\} is called a frequency vector (a.k.a. rotation vector) of {{\cal T}^d}. A frequency vector ω is said to be rationally dependent or commensurable if there exists a vector \boldsymbol{k} \in \mathbb{Z}^d \backslash\{\mathit{\pmb{0}}\} such that k · ω = 0. Specifically when d = 2, this paper defines {{\cal T}^2} to be a rational (respectively irrational) flux surface if the corresponding ω is commensurable (respectively incommensurable). The frequency vector ω is unique up to a transform of multiplying a square integer matrix A with \operatorname{det} \mathbf{A}= \pm 1 (a.k.a. unimodular matrix) [35, 36], i.e. any two frequency vectors ω1 and ω2 can be transformed to each other by such a matrix ω2 = Aω1. Note that the transform of A does not change the commensurability of ω.
therefore, ∂Xu/s/∂s is parallel to Bpol and of unit length.
If what is known is limited to one section Σ(ϕ) (so ϕ is omitted in this paragraph), then the 2D invariant manifold growth formula degrades to a delay ODE describing 1D invariant manifolds for a 2D map. Let \left(\boldsymbol{x}_i\right)_{i=1}^m be a hyperbolic periodic orbit under {\cal P}. Parameterize an 1D invariant branch of {{\cal W}^{{\rm{u}}/{\rm{s}}}}({{\cal P}^m}, {\boldsymbol{x}_i}) by its arc length s as {\mathit{\boldsymbol{X}}^{{\rm{u}}/{\rm{s}}}}(s):{\mathbb{R}_{ \ge 0}} \to {{\mathbb{R}}^2}, whose inverse is denoted by s(X). Then one can acquire the following equations to grow the manifold by simple analysis along the branch:
where the ellipsis dots … in the denominators, which serve to normalize, denote the same thing as the numerators. Both equations above also hold for an invariant circle C. The only thing that needs to be modified is that the circle should be parameterized as a function \boldsymbol{X}(s):\mathbb{R} \to C \subset {\mathbb{R}^2} of period the circumference of the circle, whose inverse s(\boldsymbol{X}):C \to \mathbb{R} is now a multivalued function.
4.
Demonstration of cycles and invariant manifolds
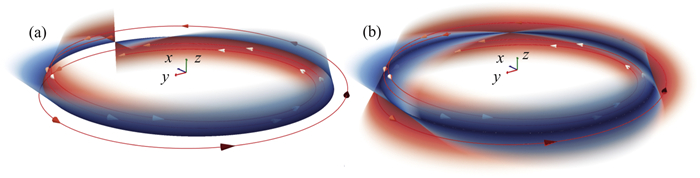
Having developed the systematic theory to characterize the invariant manifolds in 3D autonomous flows, the formulas have been implemented to present readers with a vivid picture. Two analytic and one real-world examples are presented in this section. As the simplest case, the first analytic model is a saddle cycle as shown in figure 1, which can be either non-Möbiusian or Möbiusian. Next is the more complicated dummy X-cycle model as shown in figure 2, which is acquired by twisting the cycle of the first model, i.e. let the R, Z coordinates of the cycle rely on ϕ, instead of being constants. In these two analytic examples, we exhibit the technique to construct a field by the expected trajectories. At last, a timeslice of the magnetic field on EAST is taken as a real-world example as shown in figures 3 and 5, with RMP as the non-axisymmetric perturbation.
Figure
1.
(a) and (b) show the same Möbiusian saddle cycle, of which the field is constructed by equation (26) with parameters: \left(R_0, Z_0\right)=(1.0, 0.0), Bϕ0 = 2.5, θu(ϕ) = ϕ/2 + π/2, θs(ϕ) = ϕ/2, λu/s = −e±1/3. The sprouts of two invariant branches are plotted (red for {{\cal W}^{\rm{u}}}, blue for {{\cal W}^{\rm{s}}}). (a) and (b) draw the manifolds on ϕ ∈ [0, 2π] and [0, 4π] for a half and full poloidal turn, respectively. A trajectory on the unstable branch is drawn for three toroidal turns, i.e. \phi \in[0, 6 \pi].
Figure
2.
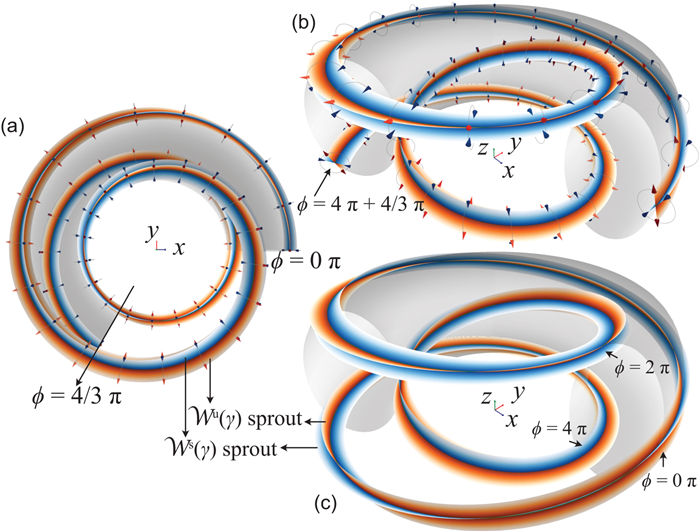
(a), (b) and (c) show the same dummy X-cycle, of which the field is constructed by equation (32) with parameters: \left(R_{\mathrm{ax}}, Z_{\mathrm{ax}}\right)=(1.0, 0.0), Bϕ, ax = 2.5, ι = n/m = 1/3, \left(R_{\mathrm{ell}}, Z_{\mathrm{ell}}\right)=(0.3, 0.5), θu/s(ϕ) = ιϕ + θ0 = ϕ/3 + π/2 ± π/9, λu/s = e±1/5. (a) shows it from the top view, (b) and (c) show it from the other view. (a) and (b) draw arrows for the two eigenvectors of {\cal D}{{\cal P}^3}(\phi ) and their opposite (blue for λ < 1, red for λ > 1), which is acquired by {\cal D}{{\cal P}^{ \pm m}} evolution formula and shall be consistent with θu/s as designed. The sprouts of four invariant branches are plotted (orange for {{\cal W}^{\rm{u}}}, blue for {{\cal W}^{\rm{s}}}). In (a) and (b), the manifolds are not shown on \phi \in[6 \pi-2 / 3 \pi, 6 \pi), in order not to shelter the eigenvector arrows. A transparent torus with the corresponding elliptic section is drawn for reference.
Figure
3.
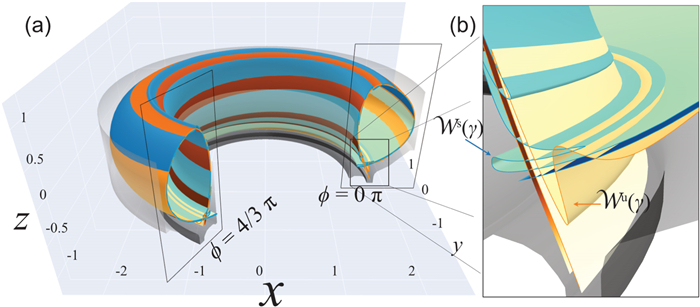
(a) 3D visualization of the invariant manifolds of the lower X-cycle γ of EAST shot #103950 at 3500 ms (EFIT + vacuum RMP). The first wall is drawn as a transparent grey surface, with the top removed in order not to shelter the manifolds. (b) Enlarged view of (a) at ϕ = 0 near the lower X-point.
Figure
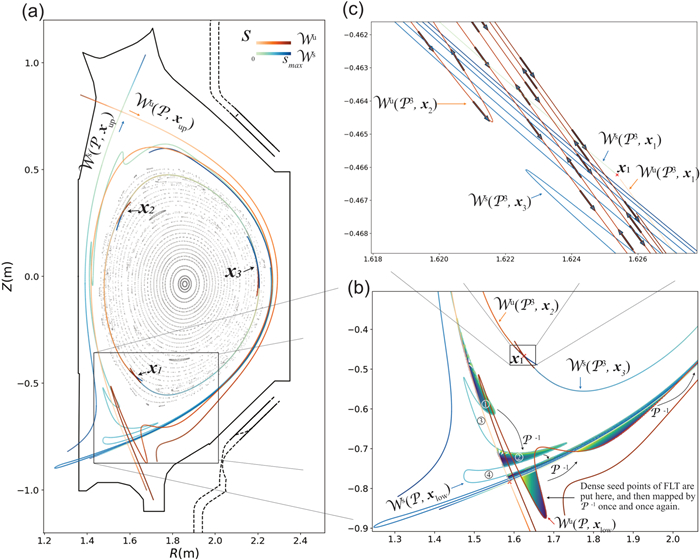
5.
(a) Poincaré plot at ϕ = 0 of EAST shot #103950 at 3500 ms (EFIT + vacuum RMP). Some invariant manifolds are grown and plotted. (b) Enlarged view of (a) near the lower X-point. Dense scatter points with color are presented to show how the regions are connected by field lines. (c) Enlarged view of (b) near x1. The blue arrows are drawn according to equation (35).
In this section, a saddle cycle model is constructed as an analytic example. Let Bϕ: = R0Bϕ0/R to simulate a tokamak, where Bϕ0 denotes the toroidal field magnitude at the axis R0. Suppose Bϕ is positive. The trajectories on the invariant manifolds of a Möbiusian cycle are expected to be like
where λu, λs (independent of ϕ) denote the two eigenvalues of {\cal D}{{\cal P}^m}, θu(ϕ), θs(ϕ) denote the corresponding two eigenvectors. If both θu and θs satisfy θ(ϕ + 2π) = θ(ϕ) + (2k + 1)π, k \in \mathbb{Z}, then the cycle is Möbiusian; if they satisfy θ(ϕ + 2π) = θ(ϕ) + 2kπ, k \in \mathbb{Z}, then the cycle is non-Möbiusian.
Let \Delta \boldsymbol{X}_{\mathrm{pol}}(\phi):=\boldsymbol{X}_{\mathrm{pol}}(\phi)-\left[R_0, Z_0\right]^{\mathrm{T}}. For the unstable trajectories, \Delta \boldsymbol{X}_{\mathrm{pol}}^{\prime}(\phi) is
\begin{aligned} \frac{\mathrm{d}}{\mathrm{d} \phi} \Delta \boldsymbol{X}_{\mathrm{pol}}(\phi) & =\left(\left|\lambda_{\mathrm{u}}\right|^{\phi / 2 m \pi}\right)^{\prime}\left[\begin{array}{c}\cos \theta_{\mathrm{u}} \\ \sin \theta_{\mathrm{u}}\end{array}\right]+\left|\lambda_{\mathrm{u}}\right|^{\phi / 2 m \pi}\left(\left[\begin{array}{c}\cos \theta_{\mathrm{u}} \\ \sin \theta_{\mathrm{u}}\end{array}\right]\right)^{\prime} \\ & =\left|\lambda_{\mathrm{u}}\right|^{\phi / 2 m \pi}\left[\begin{array}{cc}\frac{\ln \left|\lambda_{\mathrm{u}}\right|}{2 m \pi} & -\theta_{\mathrm{u}}^{\prime} \\ \theta_{\mathrm{u}}^{\prime} & \frac{\ln \left|\lambda_{\mathrm{u}}\right|}{2 m \pi}\end{array}\right]\left[\begin{array}{c}\cos \theta_{\mathrm{u}} \\ \sin \theta_{\mathrm{u}}\end{array}\right] \\ & =\left[\begin{array}{cc}\frac{\ln \left|\lambda_{\mathrm{u}}\right|}{2 m \pi} & -\theta_{\mathrm{u}}^{\prime} \\ \theta_{\mathrm{u}}^{\prime} & \frac{\ln \left|\lambda_{\mathrm{u}}\right|}{2 m \pi}\end{array}\right] \Delta \boldsymbol{X}_{\mathrm{pol}}(\phi) \\ & =\left[\begin{array}{cc}\frac{\ln \left|\lambda_{\mathrm{u}}\right|}{2 m \pi} & \frac{\ln \left|\lambda_{\mathrm{u}}\right|}{2 m \pi}\end{array}\right] \Delta \boldsymbol{X}_{\mathrm{pol}}(\phi)+\left[\begin{array}{ll}\theta_{\mathrm{u}}^{\prime}\end{array}\right] \Delta \boldsymbol{X}_{\mathrm{pol}}(\phi) .\end{aligned}
(20)
It is similar for stable trajectories, with λu, θu(ϕ) replaced by λs, θs(ϕ). Recall the FLT equation (1) in cylindrical coordinates is \Delta \boldsymbol{X}_{\mathrm{pol}}^{\prime}(\phi)=R \boldsymbol{B}_{\mathrm{pol}} / \boldsymbol{B}_\phi\left(\boldsymbol{X}_{\mathrm{pol}}(\phi), \phi\right). Expand RBpol/Bϕ around the cycle
\begin{aligned} & {\left[\begin{array}{l}R B_R / B_\phi \\ R B_Z / B_\phi\end{array}\right](R, Z, \phi)=\underbrace{\left[\begin{array}{l}R_{\mathrm{c}} B_{R 0} / B_{\phi 0} \\ R_{\mathrm{c}} B_{Z 0} / B_{\phi 0}\end{array}\right]}_{\text {vanishes in this case }}(\phi)} \\ & \quad+\frac{\partial R \boldsymbol{B}_{\mathrm{pol}} / B_\phi}{\partial(R, Z)}(\phi)\left[\begin{array}{c}R-R_0 \\ Z-Z_0\end{array}\right]+\mathcal{O}\left(\left|\Delta \boldsymbol{X}_{\mathrm{pol}}\right|^2\right), \end{aligned}
where the subscript c is short for cycle. The FLT equation turns out to be {\rm{\Delta }}\boldsymbol{X}_{{\rm{pol}}}^\prime (\phi ) = \frac{{\partial R{B_{{\rm{pol}}}}/{B_\phi }}}{{\partial (R, Z)}}\;\, {\rm{\Delta }}{\boldsymbol{X}_{{\rm{pol}}}}(\phi ) + {\cal O}(|{\rm{\Delta }}{\boldsymbol{X}_{{\rm{pol}}}}{|^2}). To construct a field such that the nearby trajectories are repelled (respectively attracted) at θu (respectively θs) as expected in equation (19), it is required that
Eigen decomposition is employed to make it possible to let the first orders of the equations above equal at θu and θs, respectively. As the cost of such decomposition, \theta_{\mathrm{u}}^{\prime} and \theta_{\mathrm{s}}^{\prime} have to be equal, denoted by \theta^{\prime} afterwards.
\frac{\partial R \boldsymbol{B}_{\mathrm{pol}} / B_\phi}{\partial(R, Z)}(\phi)=\mathbf{V} \boldsymbol{\Lambda} \mathbf{V}^{-1}+\left[{ }_{\theta^{\prime}}{ }^{-\theta^{\prime}}\right]
The trajectory equation (19) have been preset by known λu, λs, θu(ϕ), θs(ϕ), which means the right-hand side of equation (22) is what we can control. Based on that, the left-hand side of equation (22) can be calculated, i.e. the field we want to construct, after which the linearized BR, BZ field is acquired (note BR, BZ at the axis have been preset to zero)
The construction is finished. An example of Möbiusian saddle cycle is shown in figure 1.
The non-Möbiusian case is not shown, because it is easy enough to imagine. Some readers may wonder the higher order terms \frac{\partial^k \boldsymbol{B}_{\mathrm{pol}}}{\partial(R, Z)^k}, k ≥ 2, which are determined by \frac{\partial^k R \boldsymbol{B}_{\mathrm{pol}} / B_\phi}{\partial(R, Z)^k}=\mathbf{0} in the left-hand side of equation (21).
4.2
Dummy X-cycle
In this subsection, R0, Z0 in the last model are replaced (see the trajectory equation (19)) with Rc(ϕ), Zc(ϕ), two functions dependent on ϕ, respectively. Here, an example expression of Rc(ϕ), Zc(ϕ) is given
where the subscript c is short for cycle, ell for elliptic, and ax for axis. Similar to the first model, set Bϕ(R, Z, ϕ) = Bϕ(R) = RaxBϕ, ax/R to simulate a tokamak.
The zeroth order components of field expansion are denoted by BRc, BZc, Bϕc, to highlight that they are evaluated on the cycle, e.g. Bϕc = Bϕ(Rc(ϕ), Zc(ϕ), ϕ). According to the spiral cycle equation defined above, the following equalities hold
The construction is finished. A dummy non-Möbiusian X-cycle with q = m/n = 3/1 is shown in figure 2.
4.3
A real-world example
The equilibrium field of EAST shot # 103950 at 3500 ms given by EFIT is taken as background, superimposed with a non-axisymmetric field induced by the RMP coils running in n = 1 mode. The plasma response is not considered here for simplicity. Bϕ of this shot is negative everywhere, and Bpol at R-Z cross-sections is clockwise.
On locating the periodic points of the Poincaré map, the simplest discrete Newton method {\boldsymbol{x}_{j + 1}} = {\boldsymbol{x}_j} - h{\left[{{\cal D}\boldsymbol{G}\left({{\boldsymbol{x}_j}} \right)} \right]^{ - 1}}\boldsymbol{G}\left({{\boldsymbol{x}_j}} \right) is employed [37], where G(x) : = F(x) − I and I is the identity map. To locate m-periodic orbits of the Poincaré map {\cal P}(\phi ) at the section ϕ, our map F is chosen to be the mth iterate of {\cal P}(\phi ), that is {{\cal P}^m}(\phi ).
After locating the cycle, one needs to know the {\cal D}{{\cal P}^m}(\phi ) of this cycle at every section, which is the job of {\cal D}{{\cal P}^{ \pm m}} evolution formula. This formula is a traditional matrix ODE system. The Python function scipy.integrate.solve_ivp and the Julia package DifferentialEquations.jl have prepared a lot of numeric algorithms for such ODEs. Next is to eigen decompose {\cal D}{{\cal P}^m}(\phi ), which can be done by, for example, the Python function scipy.linalg.eig. The two eigenvectors of {\cal D}{{\cal P}^m}(\phi ) and their opposite are the directions towards which the invariant manifolds grow at the beginning.
only requires two variables on the right-hand side, RBpol/Bϕ and ∂Xu/s/∂ϕ. In the numeric implementation, RBpol/Bϕ is linearly interpolated on a regular grid of shape \left[n_R, n_Z, n_\phi\right]. For ∂Xu/s/∂ϕ, different people have different ways to handle it numerically. In the following two subsections, two approaches to grow manifolds are exhibited.
4.3.1
Naive field line tracing
The simpler scheme is to distribute a line of Poincaré seed points along the eigenvector of a periodic point. To compute the arc length s of a branch of \mathcal{W}^{\mathrm{u} / \mathrm{s}}\left(\mathcal{P}^m, \boldsymbol{x}_0\right) requires the FLT Poincaré orbits used to construct the manifold be ordered, which is achieved with the assistance of the {\cal D}{{\cal P}^m}(\phi ) eigenvalues in this paper.
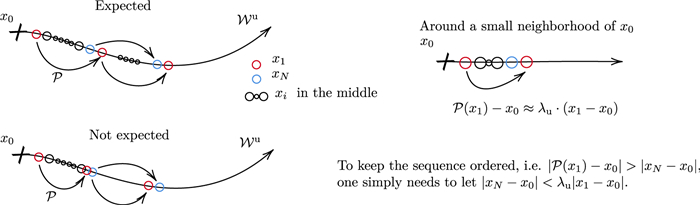
Suppose x0 is a saddle fixed point of the 2D Poincaré map {\cal P} at an R-Z section. Denote the unstable eigenvalue and eigenvector of {\cal D}{\cal P}({\boldsymbol{x}_0}) by λu and vu. If x0 is instead an m-periodic saddle point, one simply needs to substitute {\cal D}{{\cal P}^m}({\boldsymbol{x}_0}) for {\cal D}{\cal P}({\boldsymbol{x}_0}). Seed a line of points \left(\boldsymbol{x}_1, \ldots, \boldsymbol{x}_N\right) along vu, equally spaced, i.e. xi+1 − xi is a constant for 0 ≤ i ≤ N − 1. If λu ≤ N, {\cal P}({x_1}) probably falls behind xN, i.e. the s of {\cal P}({x_1}) is smaller than that of xN. This makes it difficult to compute s, because the order of s is not certain. Let {\cal X} be a sequence defined by
It is expected that the s of {\cal P}({\boldsymbol{x}_1}) should be greater than that of xN, the s of {{\cal P}^2}({\boldsymbol{x}_1}) should be greater than that of {\cal P}({\boldsymbol{x}_N}), and so on, i.e. the s of {{\cal P}^{k + 1}}({\boldsymbol{x}_1}) should be greater than that of {{\cal P}^k}({\boldsymbol{x}_N}), as shown in figure 4. In fact, as long as the s of {\cal P}({\boldsymbol{x}_1}) is greater than that of xN, the conditions for k ≥ 1 are naturally satisfied. Now that {\cal P}(\boldsymbol{x}) \approx {\boldsymbol{x}_0} + {\lambda _{\rm{u}}}(\boldsymbol{x} - {\boldsymbol{x}_0}) in the neighborhood of x0 if x is in the direction of vu, one simply needs to put xN closer to x0 than {\cal P}({\boldsymbol{x}_1}), so that s({{\cal P}^k}({\boldsymbol{x}_N})) < s({{\cal P}^{k + 1}}({\boldsymbol{x}_1})). By virtue of this fact, the orbits are untangled with ease and one gets rid of tentative manifold growth methods [11–15], which need to decrease growth step when the local manifold curvature is large. In other words, it is ensured that the sequence
is a strictly increasing sequence, which guarantees that it is safe to compute s by simply accumulating the lengths of segments. Apart from this advantage, this technique to grow manifolds applies to hyperbolic fixed points of n-dimensional maps, n \in \mathbb{N}^{+}.
The invariant manifolds in figures 3 and 5 are grown by this naive FLT technique, of which the computed arc lengths s are expressed by the varying color to let it be more easy-to-understand. One can immediately observe that the confinement of this equilibrium relies mostly on the invariant manifolds of the lower X-cycle γlow, although it also has one X-cycle at top. It is also known as the disconnected double-null configuration.
The blue arrows in figure 5(c) are drawn by the invariant manifold growth formula, which takes ∂Xu/s/∂ϕ and gives ∂Xu/s/∂s. Evidently, ∂Xu/s/∂s is the growth direction of a manifold. The first order central scheme is employed to calculate ∂Xu/s/∂s (s, ϕ) by Xu/s(s, ϕ) at the two neighboring R-Z sections ϕ ± ϵ
4.3.2
Discretizing the invariant manifold growth partial differential equation (PDE) to an ODE system
The other numeric way is to transform the invariant manifold growth formula, a PDE including ∂s and ∂ϕ, to a system of ODEs with s as the evolution parameter. Transect the invariant manifold by N R-Z cross-sections at \left(\phi_i\right)_{i=1}^N to discretize it, where \left(\phi_i\right)_{i=1}^N is an arithmetic sequence with a common difference Δϕ = ϕi+1 − ϕi ranging from 0 to 2mπ − Δϕ. The R and Z coordinates of the manifold at each section contribute two variables of the system, X_R^{\mathrm{u} / \mathrm{s}}\left(s, \phi_i\right) and X_Z^{\mathrm{u} / \mathrm{s}}\left(s, \phi_i\right), totally 2N variables contributed by N sections. Thereafter, X_R^{\mathrm{u} / \mathrm{s}}\left(s, \phi_i\right) and X_Z^{\mathrm{u} / \mathrm{s}}\left(s, \phi_i\right) become univariate functions dependent on s. The manifold growth formula is thereby reduced to a 2N-dimensional ODE system
where Δ Xu/s(s, ϕi)/Δϕ denotes a numeric alternative of ∂Xu/s(s, ϕ)/∂ϕ. For example, it can be defined as the first- or second-order central difference schemes
This discretizing method works fine for the invariant manifolds of the outmost saddle cycle(s), but not so for the q = m/n = 3/1 island chain, in which case the four numerically grown invariant branches around an island are almost identical and can not be distinguished as if there were no island there. The primary reason is suspected to be that the two eigenvectors are so close to each other that the grid granularity is not fine enough to distinguish the branch growth directions by finite difference. Although this scheme suffers such a numeric instability, the authors still think it is worth introducing, because this scheme directly utilizes the invariant manifold growth formula and can be useful for those cases that the two eigenvectors of {\cal D}{{\cal P}^m} are not so close.
4.3.3
Denotations and notions explained with the aid of figures
A periodic orbit for a map is best seen as a whole to reflect the intrinsic homoclinic/heteroclinic structure. Then, one can use {{\cal W}^{\rm{u}}}\left({{\cal P}, \left\{ {{\boldsymbol{x}_1}, {\boldsymbol{x}_2}, {\boldsymbol{x}_3}} \right\}} \right) to denote all the unstable branches of the X-cycle of the q = m/n = 3/1 island chain in figure 5. This X-cycle has three strike points \left\{ {{\boldsymbol{x}_1}, {\boldsymbol{x}_2}, {\boldsymbol{x}_3}} \right\} through ϕ = 0 section, each of which has two stable and two unstable branches. Totally there are 6 branches of {{\cal W}^{\rm{s}}}\left({{\cal P}, \left\{ {{\boldsymbol{x}_1}, {\boldsymbol{x}_2}, {\boldsymbol{x}_3}} \right\}} \right) and 6 branches of {{\cal W}^{\rm{u}}}\left({{\cal P}, \left\{ {{\boldsymbol{x}_1}, {\boldsymbol{x}_2}, {\boldsymbol{x}_3}} \right\}} \right). One can also specify a manifold in a more fine-grained way by replacing {\cal P} with {{\cal P}^m}, \left\{ {{\boldsymbol{x}_1}, {\boldsymbol{x}_2}, {\boldsymbol{x}_3}} \right\} with xi, that is {{\cal W}^{\rm{u}}}\left({{{\cal P}^3}, {\boldsymbol{x}_i}} \right) and {{\cal W}^{\rm{s}}}\left({{{\cal P}^3}, {\boldsymbol{x}_i}} \right), which represent the two unstable and two stable branches belonging to the specific point xi, respectively. Obviously
The 2D manifold {{\cal W}^{{\rm{u}}/{\rm{s}}}}(\boldsymbol{B}, \gamma ) consists of all the corresponding 1D manifolds {{\cal W}^{{\rm{u}}/{\rm{s}}}}({{\cal P}^m}(\phi ), \boldsymbol{x}(\phi )) for the Poincaré maps {{\cal P}^m}(\phi ) at all sections ϕ, i.e.
where x(ϕ) denotes the (R, Z) coordinates of the cycle γ at ϕ angle, and \mathcal{P}(\phi): \mathbb{R}^{+} \times \mathbb{R} \rightarrow \mathbb{R}^{+} \times \mathbb{R} denotes the Poincaré map at ϕ. where x(ϕ) is a 6π-periodic function representing the (R, Z) coordinates of this X-cycle γ. {\cal P}({\boldsymbol{x}_0}) = {\boldsymbol{x}_1}, {\cal P}({\boldsymbol{x}_1}) = {\boldsymbol{x}_2}, {\cal P}({\boldsymbol{x}_2}) = {\boldsymbol{x}_3}. Then, x(0) = x1, x(−2π) = x2, x(–4π) = x3 (Bϕ is negative in this shot). Viewing the 3D figure 3 and 2D figure 5 together can help understand the relationship between 2D manifolds {{\cal W}^{{\rm{u}}/{\rm{s}}}}(\boldsymbol{B}, \gamma ) and 1D manifolds {{\cal W}^{{\rm{u}}/{\rm{s}}}}({{\cal P}^m}(\phi ), \boldsymbol{x}(\phi )).
In figure 5(b), some regions enclosed by the invariant manifolds of γlow are filled by colored scatter points. Points are marked with distinctive colors, and then mapped by {{\cal P}^{ - 1}}. How these regions are connected by field lines is reflected through the color pattern of scatter points. Let xlow be the strike point of γlow crossing the ϕ = 0 section. All the points of transversal intersection of the two manifolds {{\cal W}^{\rm{u}}}({\cal P}, {\boldsymbol{x}_{{\rm{low}}}}) and {{\cal W}^{\rm{s}}}({\cal P}, {\boldsymbol{x}_{{\rm{low}}}}) (the red and blue curves, respectively) are homoclinic to xlow.
Although the fluxes in the colored regions filled by scatter points are the same, e.g. the ① and ② regions in figure 5(b), this flux value probably differs from that of the uncolored regions, e.g. ③ and ④. One should always be careful of this fact.
5.
Discussion and conclusion
5.1
Comparisons with existing works
This subsection compares various approaches developed to study invariant manifolds, albeit obvious. The comparisons of our {\cal D}{{\cal P}^m} evolution and invariant manifold growth formulas with others' works are presented in this subsection subsequently.
Most of existing research has been satisfied with the Floquet's normal form. Floquet theory is so successful that people cease further exploration. Floquet theorem governs how {\cal D}{\boldsymbol{X}_{{\rm{pol}}}}({\phi _{\rm{s}}}, {\phi _{\rm{e}}}) varies with ϕe. However, it remains unclear how {\cal D}{\boldsymbol{X}_{{\rm{pol}}}}({\phi _{\rm{s}}}, {\phi _{\rm{s}}} + 2m\pi ) changes with ϕs, which is essential to lessen the computational resources needed to solve for the initial growth directions of stable and unstable manifolds. The most similar work to {\cal D}{{\cal P}^m} evolution formula is given by Tsutumi [38]. Tsutumi considered the following linear system:
where x = x(ϕ, t) is a complex n-column vector and A(ϕ, t) is a complex n × n matrix function T-periodic in ϕ. Theorem 1. in [38] is repeated as below:
There exists a monodromy matrix of (1.1) which does not depend on t7 if and only if there exists a matrix function Γ(ϕ, t) which is defined on ∞ < ϕ, t < ∞, T-periodic in ϕ, and satisfies
7 In [38], 'there exists a monodromy matrix of (1.1) which does not depend on t′ is equivalent to that 'the internal structure of every monodromy matrix of (1.1) does not depend on t′. By internal structure, Tsutumi means the characteristic multipliers of a matrix and their algebraic and geometric multiplicities.
Tsutsumi's equation (1.2) above is more complicated than our {\cal D}{{\cal P}^{ \pm m}} evolution formula (11) because A(ϕ, t) relies on both ϕ and t. If ∂A /∂t vanishes, one can easily observe that Γ is governed by the same equation as {\cal D}{{\cal P}^{ \pm m}} evolution formula. Tsutsumi did not explain in [38] what Γ can be and how to construct it. His attention was paid to the condition of A(ϕ, t) such that the monodromy matrix does not depend on t. This condition is revealed in his theorem by the existence of the matrix function Γ which satisfies equation (1.2).
The works similar to our invariant manifold growth formula are collated into table 2, in which the work of SS Abdullaev is discussed in the next paragraph and appendix B in more detail. As shown in table 2, the classical invariance equation (1.7) in [10] for n-dimensional maps might be too general for fusion scientists to be useful. TE Evans, JP England, and JM Ottino et al focused on numerical or experimental methods rather than analysis.
Pure numeric, see section 3 of [29] 'Invariant manifolds associated with a hyperbolic fixed point of the Trip3d_Map, such as ×0 in figure 2, are calculated by constructing the (un)stable eigenvectors \vec{e}_{(\mathrm{u}), \mathrm{s}} associated with a fixed point × and populating a line segment directed along \vec{e}_{(\mathrm{u}), \mathrm{s}} with a set of evenly distributed points'
England et al
1D manifolds of 2D maps [13], 1D manifold of (n − 1)-D Poincaré map induced by n-D flow [14], 2D manifolds of 3D flows [15]
Ottino et al visualized the invariant manifolds schematically by means of a fluid mechanical experiment. In [27], the caption of figure 5.6.3 writes 'Visualization of manifolds Ws(P) and Wu(P) by means of a flow visualization (thought) experiment....'; the caption of figure 5.8.3 writes 'Visualization of manifolds Ws(P) in a time-periodic system by means of a fluid mechanical experiment....'; a sentence around figure 5.8.3 writes 'figure 5.8.3 (which is a continuation of figure 5.6.3) shows, schematically, intermediate times...'
Abdullaev [30] has made some contributions to establishing the formula of stable and unstable manifolds. Here we point out the following facts worth noting about his work: (a) his theory relies on the assumption that the perturbation to an axisymmetric magnetic field is small so that the FLT system can be transformed to a perturbed Hamiltonian form; (b) the Poincaré integral is employed to acquire a first order approximation to Poincaré map. By contrast, our Poincaré map is exact; (c) the final formula F(s, u)(ϕ, x, y) = 0 is implicit instead of explicit; (d) the (x, y) coordinates appearing in the formula are not the standard (R, Z) cylindrical coordinates. The x- and y-axes are even probably not perpendicular. A more detailed comparison equipped with equations is put in appendix B.
5.2
Conclusion
Although the magnetic fields in tokamaks are mostly considered axisymmetric, almost all kinds of auxiliary heating schemes, except the ohmic heating of the central solenoid, are strongly localized and non-axisymmetric. The topology of magnetic field plays a dominant role in the behaviour of the confined plasma and the scrape-off layer. Motivated by the curiosity about the intrinsic characteristics of general 3D vector fields (not necessarily divergence-free), an analytic theory on the invariant manifolds of cycles is established in this paper, where the short-period cycles are regarded the skeleton of fields.
The stable and/or unstable manifolds of hyperbolic cycles grow from the eigenvectors of {\cal D}{{\cal P}^{ \pm m}}(\phi ). By {\cal D}{{\cal P}^{ \pm m}} evolution formula (11), one gets rid of repetitive 2mπ-integration of equation (3) for {\cal D}{{\cal P}^{ \pm m}}(\phi ) at every angle ϕ. The primitive FLT ODE system (1) is extended to the invariant manifold growth formula in cylindrical coordinates (16) by analyzing the relevant differentials.
It is proposed to use the notion of invariant manifolds of outmost saddle cycle(s) to characterize the magnetic topology at the plasma edge when the field is strongly non-axisymmetric. If a tokamak operates in the single-null (respectively double-null, or somehow more strange) mode, there is one (respectively two, or more) outmost saddle cycle(s). The transversely intersecting manifolds are suspected of causing the spiral ribbon-like pattern of heat deposition on the divertor found in tokamak experiments, which needs further verification. In the scrape-off layer, how to disperse the particle and heat fluxes before they land on the divertor is also an interesting problem, worthy of more investigation. With the drift effects taken into account in the future, the heat load pattern observed by diagnostics like infrared thermography is supposed to be more consistent with the divertor regions covered by the invariant manifolds of outmost saddle cycles. For both tokamak and stellarator communities, the transport issue at the plasma boundary is essential to control the heat load below the material limit.
Appendix A.
Proofs
A.1
The geometric meaning of |{\cal D}{\boldsymbol{X}_{{\rm{pol}}}}({\phi _{\rm{s}}}, {\phi _{\rm{e}}})|
\begin{array}{*{20}{c}} \text{(Here ln is the complex logarithm instead of the real one.}\\ \text{So it can handle negative numbers).}\\
=\exp \left(\int_{\phi_{\mathrm{s}}}^{\phi_{\mathrm{e}}} \frac{R(\nabla \cdot \boldsymbol{B})}{B_\phi} \mathrm{d} \phi\right) \frac{\left.B_\phi\right|_{\phi_{\mathrm{s}}}}{\left.B_\phi\right|_{\phi_{\mathrm{e}}}} .\end{array}
Cs and Ce are the matrix \left[\begin{array}{ccc}\cos \phi & & -R \sin \phi \\ \sin \phi & & R \cos \phi \\ & 1 & \end{array}\right] evaluated at the starting and ending points, respectively.
Proof. Consider the differential relationship in cylindrical coordinates
Suppose that the solution \boldsymbol{X}\left(\boldsymbol{x}_0, t\right), crosses the R-Z crosssection \phi_{\mathrm{e}} at the time T. The relevant differentials are related by the equation \mathrm{d} \boldsymbol{X}\left(\boldsymbol{x}_0, T\right)=\mathcal{D} \boldsymbol{X}\left(\boldsymbol{x}_0, T\right) \cdot \mathrm{d} \boldsymbol{x}_0 as detailed below
where \boldsymbol{x}_0 and \boldsymbol{X}\left(\boldsymbol{x}_0, T\right) denote the starting and ending points, respectively. A similar differential analysis is done for \boldsymbol{X}_{\mathrm{pol}}\left(\cdot, \phi_{\mathrm{s}}, \phi_{\mathrm{e}}\right) as below
The equation above always holds for any \mathrm{d} x_{0 R}, \mathrm{~d} x_{0 Z}, and \mathrm{d} x_{0 \phi}, hence the corresponding coefficients shall equal
Though it is known how to calculate \frac{\partial}{\partial \phi_{\mathrm{e}}} \mathcal{D} \boldsymbol{X}_{\mathrm{pol}}\left(\phi_{\mathrm{s}}, \phi_{\mathrm{e}}\right) as shown in equation (3), little is known about \frac{\partial}{\partial \phi_{\mathrm{s}}} \mathcal{D} \boldsymbol{X}_{\mathrm{pol}}\left(\phi_{\mathrm{s}}, \phi_{\mathrm{e}}\right). Notice that {\cal D}{\boldsymbol{X}_{{\rm{pol}}}}({\phi _{\rm{s}}}, {\phi _{\rm{e}}}) is the inverse matrix of {\cal D}{\boldsymbol{X}_{{\rm{pol}}}}({\phi _{\rm{e}}}, {\phi _{\rm{s}}}). The following equation (A23) is useful to solve for \left(\mathbf{K}^{-1}\right)^{\prime} by \mathbf{K}(x) and its derivative \mathbf{K}^{\prime}(x), where \mathbf{K}(x) is a univariate matrix function
Borrow the equation (A23) to solve for \frac{\partial}{\partial \phi_{\mathrm{s}}} \mathcal{D} \boldsymbol{X}_{\mathrm{pol}}\left(\phi_{\mathrm{s}}, \phi_{\mathrm{e}}\right), as shown below
Next, calculate the total derivative of \mathcal{D} \boldsymbol{X}_{\mathrm{pol}}\left(\phi_{\mathrm{s}}, \phi_{\mathrm{s}}+\Delta \phi\right) w.r.t.
\phi_{\mathrm{s}}. Let \phi_{\mathrm{e}}=\phi_{\mathrm{s}}+\Delta \phi
For trajectories of m toroidal turn(s), \mathbf{A}\left(\phi_{\mathrm{s}}\right) and \mathbf{A}\left(\phi_{\mathrm{s}} \pm 2 m \pi\right) are identical since A is a periodic function on the cycle
\mathbf{A}\left(\phi_{\mathrm{s}}\right)=\mathbf{A}\left(\phi_{\mathrm{s}} \pm 2 m \pi\right).
(A26)
Let \Delta \phi be \pm 2 m \pi, then {\cal D}{\boldsymbol{X}_{{\rm{pol}}}}({\phi _{\rm{s}}}, {\phi _{\rm{s}}} + {\rm{\Delta }}\phi ) can be substituted by {\cal D}{{\cal P}^{ \pm m}}({\phi _{\rm{s}}}). Equation (A25) is simplified to
For cycles, \left(\mathcal{D P}^m\right)^{\prime}=\left[\mathbf{A}, \quad \mathcal{D} \mathcal{P}^m\right] implies that \lambda_1^{\prime}=0, \lambda_2^{\prime}=0 as shown by the equation (15), then \boldsymbol{\Lambda}^{\prime}=0 and equation (A33) is simplified to be
The Z component \partial X_Z^{\mathrm{u} / \mathrm{s}} / \partial s is similar.
A1.
Geometric diagram to show the relationship among the differentials ds, dϕ, dR, and dZ. It is supposed that there exists a hyperbolic cycle at bottom, from which an invariant manifold grows. (a) The differential involved in FLT, (b) Two iso-s curves and one iso-ϕ curve of the manifold.
where B0 is the toroidal magnetic field strength at the major radius R0, and \boldsymbol{A}=\left(A_R=0, A_Z, A_\phi\right) denotes the vector potential of magnetic field. The normalized poloidal flux ψp serves as the Hamiltonian. However, this transform is not always viable when the magnetic field is non-axisymmetric (the definition of ψp requires a closed flux surface diffeomorphic to \mathbb{T}^2), which limits the application of Abdullaev's method to those near-integrable systems. After that, the FLT equations are presented in the following Hamiltonian form:
where ϵ is a dimensionless perturbation parameter dictating the relative strength of perturbation, and \psi_{\mathrm{p}}^{(1)}\left(z, p_z, \phi\right) denotes the perturbation magnetic flux. Such a denotation implies an additional numeric step to transform the perturbation field Bpert(R, Z, ϕ) to \psi_{\mathrm{p}}^{(1)}\left(z, p_z, \phi\right). By comparison, B = B0(R, Z) + Bpert(R, Z, ϕ) is taken as a whole in our theory, without need to distinguish the perturbation field from the field to be perturbed.
The Poincaré map in [30] is defined to be a full poloidal turn map, with the Poincaré section Σs consisting of two segments of the ζ- and η-axes. (ζ, η) is a rectangular coordinate system centered at the X-point (see figure 1 in [30]). Note that ψp varies along the ζ-axis. Under the perturbation \psi_{\mathrm{p}}^{(1)}, the Poincaré map (ϕk, ψk) ↦ (ϕk+1, ψk+1) has the following classical general form:
where the upper and lower signs correspond to the ϕ-increasing and ϕ-decreasing Poincaré maps, respectively. P(ϕ; ψ) is an integral of \psi_{\mathrm{p}}^{(1)} along the unperturbed trajectory, a.k.a. the Poincaré integral
Be careful that the equality of equation (8) only holds when ϵ is infinitesimal, otherwise it is suggested to use ≈ instead of = in equation (8) or add a remainder to for correctness. Equation (8) is the basis for many other equations in [30], which probably also need to change to ≈ when applied to a realistic ϵ.
Let ψk+1 = 0 at ϕk+1 → ±∞ in equation (8), then Abdullaev immediately obtains the following implicit form of the subset of these two manifolds on Σs:
where the upper and lower signs correspond to the stable and unstable manifolds, respectively.
For the points of these two manifolds not on Σs, they are mapped to Σs along the field lines by equation (36) in [30]. Under the assumption that the magnetic perturbation at the X-point is small and can be neglected, ax, ay coefficients in equation (36) are omitted to obtain the following simplified implicit manifold expression:
Remind that x- and y-axes are not necessarily perpendicular. The slope of x-axis in (η, ζ) plane is β/α (y = (-\alpha \xi+\beta \eta) / \sqrt{2 \gamma}=0 \text { on } x \text {-axis }), while that of y-axis is −β/α (x=(\alpha \xi+\beta \eta) / \sqrt{2 \gamma}=0 on y-axis). The product of their slopes equals −β2/α2, which does not necessarily equal −1.
Acknowledgments
This work was supported by National Magnetic Confined Fusion Energy R&D Program of China (No. 2022YFE03030001), National Natural Science Foundation of China (Nos. 12275310 and 12175277), the Science Foundation of Institute of Plasma Physics, Chinese Academy of Sciences (No. DSJJ-2021-01) and the Collaborative Innovation Program of Hefei Science Center, CAS (No. 2021HSC-CIP019).
Frerichs H G et al 2010 Three-dimensional Plasma Transport in Open Chaotic Magnetic Fields: A Computational Assessment for Tokamak Edge Layers (Jülich: Forschungszentrum Jülich GmbH)
Broer H W and Sevryuk M B 2010 Chap 6- KAM theory: quasi-periodicity in dynamical systems Handbook of Dynamical Systems ed H W Broer, B Hasselblatt and F Takens (Amsterdam: Elsevier) p 249
[36]
Olikara Z P and Howell K C 2010 Computation of quasi-periodic tori in the circular restricted three-body problem. Adv. Astronaut. Sci.136 313
Wei, W., Knieps, A., Liang, Y. Enlarging the divertor wetted area through the lobe structure intertwined by the stable and unstable manifolds of the outermost X-cycle. 2024.
2.
Wei, W., Liang, Y. First-order shift formula of stable and unstable manifolds under perturbation and its application in magnetic confinement fusion. 2023.
1.
Wei, W., Knieps, A., Liang, Y. Enlarging the divertor wetted area through the lobe structure intertwined by the stable and unstable manifolds of the outermost X-cycle. 2024.
2.
Wei, W., Liang, Y. First-order shift formula of stable and unstable manifolds under perturbation and its application in magnetic confinement fusion. 2023.
Pure numeric, see section 3 of [29] 'Invariant manifolds associated with a hyperbolic fixed point of the Trip3d_Map, such as ×0 in figure 2, are calculated by constructing the (un)stable eigenvectors \vec{e}_{(\mathrm{u}), \mathrm{s}} associated with a fixed point × and populating a line segment directed along \vec{e}_{(\mathrm{u}), \mathrm{s}} with a set of evenly distributed points'
England et al
1D manifolds of 2D maps [13], 1D manifold of (n − 1)-D Poincaré map induced by n-D flow [14], 2D manifolds of 3D flows [15]
Ottino et al visualized the invariant manifolds schematically by means of a fluid mechanical experiment. In [27], the caption of figure 5.6.3 writes 'Visualization of manifolds Ws(P) and Wu(P) by means of a flow visualization (thought) experiment....'; the caption of figure 5.8.3 writes 'Visualization of manifolds Ws(P) in a time-periodic system by means of a fluid mechanical experiment....'; a sentence around figure 5.8.3 writes 'figure 5.8.3 (which is a continuation of figure 5.6.3) shows, schematically, intermediate times...'

 DownLoad:
DownLoad: